 |
| Object Recognition and Detection with Deep Learning |
- Time Period: September 2006 - present.
- Participants: Koray Kavukcuoglu, Kevin Jarrett, Y-Lan Boureau, Rob Fergus, Yann LeCun (Courant Institute/CBLL).
- Sponsors: ONR, NSF.
- Description: This is a series of projects whose goal is to
produce category-level object recognition systems with state of the
art performance that can run in real time. The systems are
hierarchical (multi-stage) and use "deep learning" methods
(unsupervised and supervised) to train the features at all levels.
A convolutional network pre-trained with sparse coding methods
and refined with supervised gradient descent achieves over 70% correct
recognition rate on the Caltech-101 dataset.
- MORE INFORMATION, VIDEO >>>>>.
| Sparse Coding for Feature Learning |
- Time Period: 2008 - present.
- Participants: Karol Gregor, Koray Kavukcuoglu, Arthur Szlam, Rob Fergus, Yann LeCun (Courant Institute/CBLL).
- Sponsors: ONR, NSF.
- Description: We are developing unsupervised (and semi-supervised) learning algorithms to learn
visual features. The methods are based on the idea that good feature representation should be high dimensional
(so as to facilitate the separability of the categories), should contain enough information to reconstruct the
input near regions of high data density, and should not contain enough information to reconstruct inputs in
regions of low data density. This lead us to use sparsity criteria on the feature vectors. Many of the sparse coding
methods we have developed include a feed-forward predictor (a so-called encoder) that can quickly produce an
approximation of the optimal sparse representation of the input. This allows us to use the learned feature
extractor in real-time object recognition systems. Variant of sparse coding are proposed, including one
that uses group sparsity to produce locally invariant features, two methods that separate the "what" from
the "where" using temporal constancy criteria, and two methods for convolutional sparse coding, where the
dictionary elements are convolution kernels applied to images.
- MORE INFORMATION >>>>>.
| Action Recognition in Video with Convolutional Networks |
- Time Period: 2009 - present.
- Participants: Graham Taylor, Chris Bregler, Rob Fergus, Yann LeCun (Courant Institute/CBLL).
- Sponsors: DARPA, ONR.
- Description: A trainable system was built to recognize actions in videos.
The first layer is a Convolutional Gated Restricted Boltzmann Machine, which is trained
in an unsupervised manner. It automatically learns features that primarily encode motion.
The second layer uses sparse coding to learn mid-level features in an unspervised manner.
The feature vectors thereby obtained are pooled over time, using a max-pooling operation,
and fed to a Support vector Machine. Excellent performance was obtained on the Hollywood-2
dataset. A similar system was built to recognize actions on the KTH dataset. It also
uses a CGRBM at the first layer, but uses a 3D (spatio-temporal) convolutional network
architecture for the following layers.
- MORE INFORMATION >>>>>.
| Embedded Hardware for Real-Time Vision |
- Time Period: 2008 - present.
- Participants: Clement Farabet, Yann LeCun (Courant Institute/CBLL), Eugenio Culurciello (Yale EE).
- Sponsors: ONR, US Army/STTR, NYU/Poly.
- Description: Our aim is to implement convolutional networks
and other vision algorithms on small, low-power specialized hardware.
As of september 2010, we have an operational implementation of
convolutional networks running on a development board built around a
Xilinx Virtex-6 FPGA. We also have an implementation running on a
custom 8x7cm board built around a Xilinx Virtex-4 FPGA. The system
uses a new architectural concept for high-throughput processing of
streams of data, borrowing ideas from "dataflow" architecture
concepts. The design is called "NeuFlow".
- MORE INFORMATION, VIDEO >>>>>.
| Unsupervised Deep Learning |
- Time Period: September 2004 - present.
- Participants: Marc'Aurelio Ranzato, Koray Kavukcuoglu, Y-Lan Boureau, Yann LeCun (Courant Institute/CBLL).
- Sponsors: DARPA, ONR, NSF.
- Description: Animals and humans can learn to see, perceive,
act, and communicate with an efficiency that no Machine Learning
method can approach. The brains of humans and animals are "deep", in
the sense that each action is the result of a long chain of synaptic
communications (many layers of processing). We are currently
researching efficient learning algorithms for such "deep
architectures". We are currently concentrating on unsupervised
learning algorithms that can be used to produce deep hierarchies of
features for visual recognition. We surmise that understanding deep
learning will not only enable us to build more intelligent machines,
but will also help us understand human intelligence and the mechanisms
of human learning.
- MORE INFORMATION >>>>>.
| EBLearn: A C++ library for deep/energy-based learning and convolutional nets |
- Time Period: 2008 - present.
- Participants: Pierre Sermanet, Koray Kavukcuoglu, Yann LeCun (Courant Institute/CBLL).
- Sponsors: Willow Garage, ONR.
- Description: EBLearn is a C++ library that implements a
number of classes and functions for machine learning and computer
vision. EBLearn makes it easy to construct complex learning machines
by assembling functional blocks. A semi-automatic differentiation
mechanism enables easy gradient-based learning. The Library
implements such models as convolutional networks, and makes it
possible to easily train systems that can detect objects in images
(e.g. faces, pedestrians). The library is platform independent, and
can be compiled on Linux, Windows, Android, and other platform. It
contains a class hierarchy and several functions for manupilating
multi-dimensional tensors. The API is inspired by the machine
learning library in the Lush language.
- MORE INFORMATION >>>>>.
| Dynamic Factor Graphs for Sequential Data Analysis and Prediction |
- Time Period: September 2006 - December 2010.
- Participants: Piotr Mirowski, Yann LeCun (Courant Institute/CBLL).
- Sponsors: ONR.
- Description: A Dynamic Factor Graph models sequential data
such as financial time-series, biological (DNA/protein) sequences,
text, and other modalities. A DFG includes factors modeling joint
probabilities between hidden and observed variables, and factors
modeling dynamical constraints on hidden variables. The DFG assigns a
scalar energy to each configuration of hidden and observed
variables. A gradient-based inference procedure finds the
minimum-energy state sequence for a given observation sequence. Using
smoothing regularizers, DFGs have been shown to reconstruct chaotic
attractors and to separate a mixture of independent oscillatory
sources perfectly. Our DFGs outperformed the best known algorithm
on the CATS competition benchmark for time series prediction. DFGs
also successfully reconstruct missing motion capture data.
- MORE INFORMATION >>>>>.
- Time Period: September 2006 - present.
- Participants: Sumit Chopra, Yann LeCun (Courant Institute/CBLL),
Trivikraman Thampy, John Leahy, Andrew Caplin (Economics Dept, NYU).
- Sponsors: NYU
- Description: We are developing a new type of relational
graphical models that can be applied to "structured regression
problem". A prime example of structured regression problem is the
prediction of house prices. The price of a house depends not only on
the characteristics of the house, but also of the prices of similar
houses in the neighborhood, or perhaps on hidden features of the
neighborhood that influence them. Our relational regression model
infers a hidden "desirability sruface" from which house prices
are predicted.
- MORE INFORMATION >>>>>.
- Time Period: September 2003 - present.
- Participants: Yann LeCun, Sumit Chopra, Marc'Aurelio Ranzato, Y-Lan Boureau, Fu-Jie Huang (Courant Institute/CBLL)
- Sponsors: NSF.
- Description:
Probabilistic graphical models associate a probability to each
configuration of the relevant variables. Energy-based
models (EBGM) associate an energy to those configurations,
eliminating the need for proper normalization of probability
distributions. Making a decision (an inference) with an EBM consists
in comparing the energies associated with various configurations of
the variable to be predicted, and choosing the one with the smallest
energy. Such systems must be trained discriminatively to associate
low energies to the desired configurations and higher energies to
undesired configurations. A wide variety of loss function can be usedo
for this purpose. We give sufficient conditions that a loss function
should satisfy so that its minimization will cause the system to
approach to desired behavior.
- Latest Publication:
- [LeCun et al
2006]. A Tutorial on Energy-Based Learning, in
Bakir et al. (eds) "Predicting Structured Outputs", MIT Press
2006.
- MORE INFORMATION >>>>>.
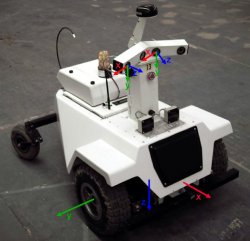
| LAGR: Learning Applied to Ground Robots |
|
Team Leaders:
Yann LeCun (Courant Institute/CBLL),
Urs Muller (Net-Scale Technologies).
Team Members:
Former Team Members:
Sponsor: DARPA
Description:
Our team is one of 8 participants in the LAGR project
funded by the US Government. Each LAGR team receives an indentical
copy of the LAGR robot, built be the National Robotics Engineering
Consortium at Carnegie-Mellon University.
The purpose of the project is to design vision and learning algorithms
to allow the robot to navigate in complex outdoors environment.
MORE INFORMATION >>>>>.
|
|
| Epilepsy Seizure Prediction with Convolutional Networks |
- Time Period: 2006 - 2009.
- Participants: Piotr Mirowski, Yann LeCun (Courant Institute/CBLL).
- Sponsors: NYU Medical Center
- Description: A collaboration between CBLL, Dr. Deepak
Madhavan (University of Nebraska Medical Center), and Dr. Ruben (NYU
Comprehensive Epilepsy Center). In 2009, our methodology achieved the
best known result on the 21-patient EEG public dataset from the
University of Freiburg. Our best algorithm succeeded in predicting all
test seizures with no false positives on 15 patients out of 21. The
method is built around a temporal convolutional network applied to
wavelet-based phase-locking synchrony features.
- MORE INFORMATION >>>>>.
| DAVE: Learning Vision-Based Obstacle Avoidance for Mobile Robots |
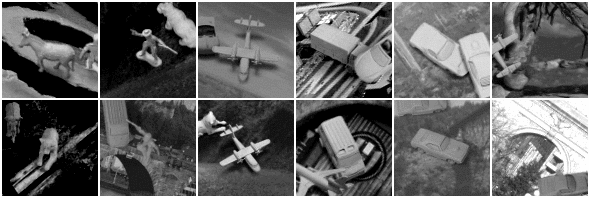
| NORB: Generic Object Recognition in Images |
- Time Period: September 2003 - 2009.
- Participants: Fu Jie Huang, Yann LeCun (Courant Institute/CBLL), Leon Bottou (NEC Labs).
- Sponsers: NSF.
- The recognition of generic object categories with invariance to pose,
lighting, diverse backgrounds, and the presence of clutter is one of
the major challenges of Computer Vision.
We are developing learning systems that can recognize generic object
purely from their shape, independently of pose, illumination, and
surrounding clutter.
- Publications:
- [LeCun, Huang, Bottou, 2004].
Learning Methods for Generic Object Recognition with Invariance to Pose and Lighting
Proceedings of CVPR 2004.
- DatasetDownload the
NORB dataset.
- MORE INFORMATION, VIDEOS, PAPERS >>>>>.
|

|
- Time Period: January 2004 - present.
- Participants: Feng Ning, Yann LeCun (Courant Institute/CBLL),
Leon Bottou (NEC Labs), Fabio Piano (NYU, Biology Dept), Paolo Barbano
(Yale University).
We are using convolutional networks and conditional random fields to
automatically segment movies of developing C. Elegans into regions:
cell nucleus, nucleus membrane, cytoplasm, cell membrane.
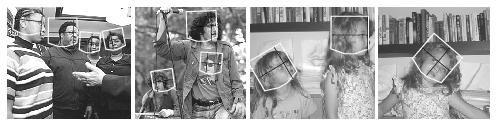
| Simultaneous Face Detection and Pose Estimation |
- Time Period: September 2003-June 2004.
- Participants: Margarita Osadchy (NEC Labs, Technion), Matt Miller (NEC
Labs), Yann LeCun (Courant Institute/CBLL).
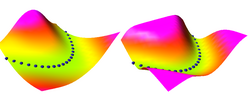
- Description:
We developed a novel method for real-time, simultaneous multi-view
face detection and facial pose estimation. The method employs a
convolutional network that maps face images to points on a manifold,
parameterized by pose, and non-face images to points far from that
manifold. This system is trained as an "Energy-Based Model"
with a discriminative loss function.
- Publications:
- Video: watch a video of the system in action:
[AVI, 4.9MB].
- MORE INFORMATION, VIDEOS, PAPERS >>>>>.
|
|
