|
 |
Seminar/Workshop Course on Mobile Robotics
Instructor: Yann LeCun, 715 Broadway, Room 1220, x83283, yann [ a t ] cs.nyu.edu
Classes: Wednesdays 3:00-4:50PM, Room 1221, 715/719 Broadway.
Office Hours for Prof. LeCun: Wednesdays 5:00-7:00 PM
Click here for schedule and course material >>>
|
This course will cover methods and algorithms used in modern mobile
robotics systems, including 3D vision, occupancy maps, visual
odometry, Kalman filtering, simultaneous location and mapping,
path planning, on-line learning and related topics.
This course will combine three types of sessions:
- Tutorials on basic methods and algorithms.
- Seminar-style sessions reviewing key papers from the literature.
- Workshop sessions in which students will design, implement,
and test algorithms on actual mobile robots.
| Who Can Take This Course? |
|
This course is restricted to PhD students with prior experience in
either computer vision or machine learning (and preferably both).
PhD students who have not taken graduate-level courses in computer
vision or machine learning must get authorization from the instructor
before taking the class.
MSc students may be authorized to take the class if they can
convince the instructor that they have sufficient competence
in the subject.
Due to the nature of the course, the maximum number of
students is limited.
Future editions of the course will be open to a wider audience.
|

|
The topics studied in the course include:
- sensors and sensor processing
- vision and 3D reconstruction
- Kalman filtering
- Pose prediction
- Map building
- Path planning
- Visual odometry
- Simultaneous Location and Mapping
- Autonomous Learning
- Reinforcement Learning
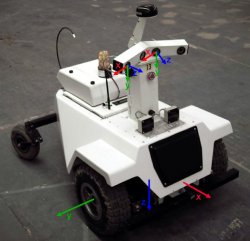
Projects will be performed on Roomba robots equiped with laptops and
USB cameras. Final projects may be run on the
LAGR robot.
|
|
Evaluation will be based on class participation and
project implementation.
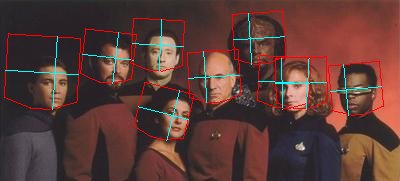
Automatic
Face Detection
Register to the course's mailing list.
Please have a look at the research project page of the
Computational and Biological Learning Lab for a few example
of machine learning research at NYU.
There are numerous opportunities for independent studies and even
undergraduate research projects. Contact Prof. LeCun for details.
Code
- Lush: A simple language for quick
implementation of, and experimentation with, numerical algorithms
(for Linux, Mac, and Windows/Cygwin). Many algorithms described in this
course are implemented in the Lush library. Lush is available on the
department's Sun machines that are freely accessible to NYU graduate
students. See Chris Poultney's
notes on installing Lush under Cygwin.
- Torch: A C++ library for machine learning.
Lush is installed on the department's PCs. It will soon be available
on the Sun network as well.
|
|